Балансировочный станок как работает
Описывается устройство, принцип действия и конструкции основных узлов станков для динамической балансировки; рассматриваются типовые узлы по принципу выполняемых функций; даются правила оценки норм точности балансировочных станков единые для заводов-изготовителей и потребителей станков.
В общем случае балансировочный станок содержит (рис. 4.1): балансировочное, приводное, измерительное и корректирующее устройства, а также дополнительные устройства, которые крепят на станине станка.
Балансировочное устройство является колебательной системой станка, в которой устанавливается и вращается неуравновешенный ротор. По колебаниям этой системы при балансировке судят о дисбалансах ротора. В современных станках применяют два типа таких устройств: зарезонансное и дорезонансное.
Зарезонансное балансировочное устройство (рис. 4.2, а) состоит из двух подвижных опор или платформы и упругих элементов, подвешивающих опоры на станине станка. Жесткость упругих элементов различна в разных направлениях. В станках с горизонтальной осью вращения упругие элементы сравнительно жестки в вертикальном направлении, тогда как в горизонтальном направлении жесткость очень мала и подвеска не препятствует колебаниям.
При проектировании и изготовлении зарезонансных станков подбирают массу опор, длину, жесткость подвески и другие параметры балансировочного устройства так, чтобы его собственная частота в горизонтальном направлении во много раз была ниже частоты вращения ротора при балансировке.
При вращении неуравновешенного ротора в зарезонансном балансировочном устройстве подвижные опоры будут колебаться в горизонтальной плоскости. Амплитуды этих колебаний пропорциональны дисбалансам в плоскостях коррекции ротора, т.е. описываются уравнениями (2).
Дорезонансное балансировочное устройство состоит из двух неподвижных опор, жестко закрепленных на станине станка. Собственные частоты колебаний опор во всех направлениях значительно превышают частоты вращения балансируемых роторов. Нижняя часть опоры представляет собой динамометр или силовой мостик. Динамические нагрузки, возникающие в опорах при вращении неуравновешенного ротора, создают малые перемещения на динамометре (рис. 4.2, б), которые усиливаются рычажной системой. Сила в опоре пропорциональна перемещению, т.е.
где к — коэффициент жесткости опоры в горизонтальном направлении.
В дорезонансном балансировочном устройстве по схеме силового мостика (рис. 4.2, в) в одном из плеч силового мостика устанавливают датчик, измеряющий непосредственно динамическую нагрузку от неуравновешенного ротора, описываемую уравнениями (1).
Балансировочные устройства разгонно-балансировочных стендов и станков для высокочастотной балансировки гибких роторов имеют одинаковую жесткость во всех направлениях — являются изотропными и имеют три или четыре опоры.
Принцип действия балансировочных устройств станков с вертикальной осью вращения аналогичен рассмотренным выше. Эти устройства часто конструктивно объединяют с приводным устройством. Балансируемую деталь закрепляют в шпиндельном узле. Шпиндель, подвеска, а иногда и приводное устройство составляют балансировочное устройство станка с вертикальной осью вращения.
Приводное устройство обеспечивает запуск, поддержание постоянной угловой скорости вращения и торможение балансируемого ротора. Основными элементами устройства (рис. 4.3) являются: электродвигатель, коробка передач, тормоз, приводное соединение, схема управления приводным устройством.
В балансировочных станках применяют электродвигатели переменного или постоянного тока различной мощности, ступенчатые и бесступенчатые передачи. Ременные передачи применяют при относительно небольших передаваемых усилиях. В этих передачах используют плоские, клинковые и круглые ремни. Зубчатые передачи обеспечивают передачу больших мощностей и ступенчатое регулирование скоростей вращения. В коробках передач станков используют цилиндрические зубчатые колеса с разным числом зубьев, вводимые последовательно в зацепление друг с другом. Изменение передаточного отношения в приводе иногда производят сменой зубчатых колес.
Приводное соединение связывает выходной вал коробки передач с балансируемым ротором. Различают осевое, ленточное и тангенциальное соединения. Осевое соединение осуществляют с помощью карданных валов (рис. 4.4) различной конструкции. В ленточном соединении применяют плоские бесконечные ремни, охватывающие балансируемую деталь (рис. 4.5). Тангенциальное (касательное) соединение создают прижимные ролики (рис. 4.6, а) и круглые ремни (рис. 4.6, б).
Приводные соединения способны передавать ограниченные крутящие моменты. Поэтому во избежание разрушения приводного устройства во время запуска и торможения ротора используют специальную электрическую схему
управления приводным устройством, обеспечивающую плавность пуска и останова ротора.
Тиристорные системы используют для управления трехфазными асинхронными электродвигателями с короткозамкнутым ротором и электродвигателями постоянного тока. Применение этих систем в балансировочных станках позволяет: управлять электродвигателем бесконтактным способом, ограничивать ударные моменты при пуске, получать широкую гамму пуско-тормозных и регулировочных режимов работы электродвигателя.
Измерительное устройство определяет значения и углы дисбалансов ротора в заданных плоскостях. Его структурная схема (рис. 4.8) состоит из датчиков, цепи разделения плоскостей коррекции или измерения, частотно-избирательных средств, индикаторов значения и угла дисбалансов.
Датчики преобразуют параметры колебаний балансировочного устройства в электрические сигналы. В балансировочных станках применяют контактные (индукционные, пьезоэлектрические) и бесконтактные (токовихревые) датчики.
Индукционный датчик представляет собой катушку индуктивности (рис. 4.9, а), которая может свободно перемещаться в магнитном поле, образованном постоянным магнитом. Катушка жестко соединяется с балансировочным устройством. При колебаниях этого устройства катушка будет также колебаться и в ней возникнет ЭДС индукции, величина которой определяется скоростью изменения магнитного потока, т.е. пропорциональна скорости колебаний балансировочного устройства. При постоянной частоте вращения ротора ЭДС пропорциональна амплитуде перемещения опор станка.
Пьезоэлектрический датчик основан на пьезоэлектрическом эффекте. При механической деформации в определенном направлении, например, кристаллов сегнетовой соли, поляризованной керамики и титаната бария в них возникает электрическое поле (рис. 4.9, б), изменяющее знаки зарядов при изменении направления деформации. Величина заряда, возникающего при пьезоэлектрическом эффекте, пропорциональна действующей силе.
Индукционные и пьезоэлектрические датчики связаны с колебательной системой станка, т.е. являются контактными датчиками.
Токовихревые датчики — бесконтактные, поэтому служат для измерения прогибов вращающихся валов. Принцип действия токовихревого датчика основан на индукционных токах (токи Фуко), возникающих в массивном проводнике, которым является ротор, помещенном в изменяющееся магнитное поле. Изменяющееся магнитное поле создается генератором высокой частоты (рис. 4.10) и колебательным контуром, состоящим из индуктивности Lи емкости С. Изменения зазора между поверхностью датчика и вала при его вращении вызывают изменение выходного напряжения.
Для отметки угла дисбаланса, частоты вращения ротора при балансировке применяют генераторы опорного сигнала, стробоскопы с газосветными лампами, фотоэлектрические и некоторые другие датчики.
Ротор генератора опорного сигнала представляет собой двухполюсный постоянный магнит, вращающийся со скоростью балансируемого ротора, и связан с ним жестко. Статор имеет две взаимно перпендикулярные обмотки и может поворачиваться в любое фиксированное положение вместе с
лимбом, нанесенным на корпусе статора. Выходное напряжение Генератора постоянной величины с известной фазой по отношению к отметке угла на роторе имеет частоту вращения ротора.
При освещении вращающегося ротора неоновой, импульсной или другой газосветной лампой возникает стробоскопический эффект. Этот эффект получается из-за того, что глаз человека импульсы света с частотой более 10 Гц не различает как отдельные вспышки, а воспринимает их как непрерывный поток света. Если импульсы следуют с частотой вращения, то ротор для человеческого глаза будет казаться неподвижным. На таком принципе основан стробоскоп, освещающий при балансировке шкалу (метку), нанесенную на ротор. Освещаемая цифра указывает угол дисбаланса относительно известного положения.
Фотоэлектрический датчик срабатывает от контрастной метки, нанесенной на роторе, и выдает короткие импульсы с частотой вращения ротора.
Электрическую цепь между виброизмерительными преобразователями и частотно-избирательными средствами называют цепью разделения плоскостей коррекции (ЦРПК). ЦРПК автоматически решает уравнения (1)-(5) относительно дисбалансов ротора.
Датчики зарезонансного балансировочного станка включены в ЦРПК последовательно (рис. 4.11, а) с такой полярностью, что их ЭДС действуют навстречу друг другу. В цепи
компенсирующего датчика включен потенциометр настройки R1 или R2. Напряжение на выходе схемы Евых складывается из полного напряжения основного датчика и части напряжения компенсирующего датчика. Цепь разделения плоскостей коррекции дополняется переключателями, реверсирующими фазу напряжения датчиков, и переключателями, коммутирующими потенциометры настройки к тому или другому датчику. Так как положения ползунков потенциометров и переключателей различны для разделения 1-й и 2-й плоскостей коррекции, то органы настройки в схеме дублируются.
В измерительных устройствах балансировочных станков применяют и другие цепи разделения плоскостей коррекции. При многоплоскостной балансировке для решения уравнений (1) в измерительное устройство вместо цепи разделения плоскостей коррекции включают аналоговые или цифровые вычислительные машины, снабженные программами расчетов. Колебания, регистрируемые вибропреобразователями, вызываются как неуравновешенностью ротора, так и погрешностями динамической балансировки. Составную часть колебаний от погрешностей называют колебаниями помех в противоположность полезным колебаниям от дисбалансов.
Корректирующие устройства входят в состав балансировочных станков, предназначенных для крупносерийного и массового производства. Они корректируют массу ротора после его остановки или во время вращения. При работе в автоматическом режиме корректирующие устройства управляются от измерительного устройства.
В балансировочных станках применяют различные дополнительные устройства, обеспечивающие его функционирование. Это пневмо- и гидросистемы, загрузочные и накопительные устройства и т.п.
Избранные главы из книги Левита М.Е., Рыженкова В.М. "Балансировка деталей и узлов". Москва, изд. "Машиностроение", 1986г.
Вас может заинтересовать наша продукция
Балансировочные станки серии БС-44H (в дорезонансном исполнении)
Горизонтальные балансировочные станки серии БС-44H в дорезонансном исполнении для динамической балансировки роторов массой от 3 кг до 10000 кг
Балансировочные станки серии БС-44S (в зарезонансном исполнении)
Горизонтальные балансировочные станки серии БС-44S в зарезонансном исполнении для динамической балансировки роторов массой от 3 кг до 10000 кг
Балансировочные станки серии БС-34
Балансировочные станки для роторов. Серия 34. Точность - до 0,1 гхмм/кг, универсальность. Балансировка роторов от 3 кг до 150 кг.
Балансировочные станки серии БС-24
Балансировочные станки для роторов. Серия 24. Точность - до 0,05 гхмм/кг, универсальность. Балансировка роторов массой от 50 грамм до 10 килограмм.
Станок балансировочный БС-24-5T для роторов турбокомпрессоров
Балансировочный станок для двухплоскостной балансировки роторов турбокомпрессоров массой от 50 г до 5 кг
Балансировочные станки для карданных валов серии БСК-44-100
Станок предназначен для динамической балансировки карданных валов различных типов массой от от 5 кг до 150 кг
Вертикальные балансировочные станки серии БС-В
Высокоточные вертикальные балансировочные станки серии БС-В дорезонансного типа для балансировки рабочих колес насосов, вентиляторов и других похожих тел вращения.
Стойка измерения управления «DAS - 382» и «DAS - 383»
Балансировочные станки для балансировки роторов средней и большой массы оснащаются напольными стойками измерения и управления серии «DAS-38x». Серия включает в себя модели «DAS - 382» и «DAS - 383».
Блок измерения управления «Грас 3.2» и «Грас 3.3»
Балансировочные станки производства компании «Робалс» оснащаются новейшей измерительной системой на базе блоков измерения и управления «Грас 3.2» и «Грас 3.3».
Контрольные роторы
Специальные контрольные роторы, спроектированные по требованиям ГОСТ, для проверки точностных параметров балансировочных станков.
Как работает балансировка нагрузки
Как работает ААА
Включение ААА
Настройка виртуального сервера аутентификации
-
Настройка виртуального сервера аутентификации
-
Настройка виртуального сервера управления трафиком
-
Настройка DNS
-
Проверка настроек для AAA
Создание профиля аутентификации
Настройка пользователей и групп
Конфигурирование политик AAA
-
Политики аутентификации
Встроенная поддержка OTP для аутентификации
Авторизация доступа пользователей к ресурсам приложения
Аудит аутентифицированных сеансов
Настройки сеанса
-
Профили сессий
-
Сессионные политики
-
Глобальные настройки сеанса
Настройки трафика
-
Профили трафика
-
Правила дорожного движения
-
Форма SSO профилей
-
SAML SSO профили
Аутентификация с помощью клиентских сертификатов
-
Сквозной сертификат клиента
Настройка AAA с часто используемыми протоколами
контролируемого обучения
Машинное обучение под наблюдением создает модель, которая делает прогнозы на основе фактических данных при наличии неопределенности. Алгоритм контролируемого обучения принимает известный набор входных данных и известные ответы на данные (выходные данные) и обучает модель генерировать разумные прогнозы для ответа на новые данные. Используйте контролируемое обучение, если вам известны данные для вывода, который вы пытаетесь предсказать.
При обучении под наблюдением используются методы классификации и регрессии для разработки прогностических моделей.
Методы классификации предсказывают дискретные ответы - например, является ли электронное письмо подлинным или спамом, или является ли опухоль злокачественной или доброкачественной. Модели классификации классифицируют входные данные по категориям. Типичные приложения включают медицинскую визуализацию, распознавание речи и кредитный скоринг.
Используйте классификацию, если ваши данные могут быть помечены, классифицированы или разделены на определенные группы или классы.Например, приложения для распознавания рукописного ввода используют классификацию для распознавания букв и цифр. В обработке изображений и компьютерном зрении для распознавания объектов и сегментации изображений используются неконтролируемые методы распознавания образов.
Распространенные алгоритмы для выполнения классификации включают в себя метод опорных векторов (SVM), деревья решений с увеличенными и суммированными данными, ближайший сосед k , наивный байесовский анализ, дискриминантный анализ, логистическую регрессию и нейронные сети.
Методы регрессии предсказывают непрерывные реакции - например, изменения температуры или колебания спроса на электроэнергию.Типичные приложения включают прогнозирование нагрузки на электроэнергию и алгоритмическую торговлю.
Используйте методы регрессии, если вы работаете с диапазоном данных или если ваш ответ является действительным числом, таким как температура или время до отказа для какого-либо оборудования.
Распространенные алгоритмы регрессии включают линейную модель, нелинейную модель, регуляризацию, ступенчатую регрессию, деревья решений с расширенными и пакетированными решениями, нейронные сети и адаптивное нейро-нечеткое обучение.
,Введение:
Банкомат - это банкомат, который позволяет клиенту совершать основные операции без помощи представителей банка. Существует два типа банкоматов (банкоматов). Базовый позволяет клиенту снимать только наличные и получать отчет об остатке на счете. Другой - более сложный аппарат, который принимает депозит, предоставляет средства оплаты кредитной картой и сообщает информацию об учетной записи.
Это электронное устройство, которое используется только клиентами банка для обработки транзакций по счетам. Пользователи получают доступ к своим учетным записям через специальный тип пластиковой карты, которая закодирована с информацией о пользователе на магнитной полосе. Полоса содержит идентификационный код, который передается на центральный компьютер банка через модем. Пользователи вставляют карту в банкоматы для доступа к учетной записи и обработки транзакций своей учетной записи. Банкомат был изобретен Джоном Шепард-Барроном в 1960 году.
 Банкомат
Банкомат Блок-схема банкомата:
Банкомат состоит в основном из двух устройств ввода и четырех устройств вывода;
Устройства ввода:
- Считыватель карт
- Клавиатура
Устройства вывода:
- Динамик
- Экран дисплея
- Чековый принтер
- Кассовый аппарат
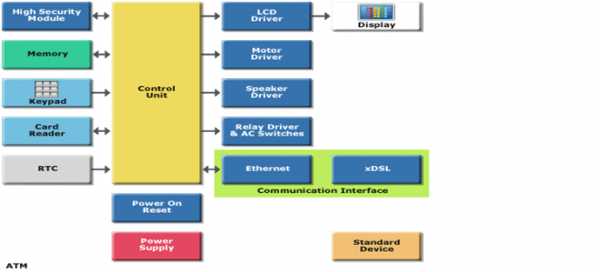 Блок-схема банкомата
Блок-схема банкомата Вход Устройства:
Устройство считывания карт представляет собой устройство ввода, которое считывает данные с карты.Устройство считывания карт является частью идентификации вашего конкретного номера счета, а магнитная полоса на задней стороне карты банкомата используется для соединения с устройством считывания карт. Карточка считывается или нажимается на картридере, который фиксирует данные вашей учетной записи, то есть данные с карточки передаются на хост-процессор (сервер). Таким образом, хост-процессор использует эти данные для получения информации от владельцев карт.
Автоматическое устройство считывания карт
Карточка распознается после того, как банкомат запросит дополнительную информацию, такую как ваш идентификационный номер, вывод средств и запрос баланса. Каждая карта имеет уникальный ПИН-код, так что у других остается мало шансов снять деньги с вашего счета. ,Существуют отдельные законы для защиты PIN-кода при отправке его на хост-процессор. ПИН в основном отправляется в зашифрованном виде. Клавиатура содержит 48 клавиш и сопряжена с процессором.
 Клавиатура банкомата
Клавиатура банкомата Устройства вывода:
Динамик обеспечивает звуковую обратную связь при нажатии определенной клавиши.
На экране дисплея отображается информация о транзакции. Каждый шаг вывода отображается на экране дисплея. ЭЛТ-экран или ЖК-экран используется большинством банкоматов.
ЖК-дисплей банкоматаЧековый принтер распечатывает все данные, записывающие ваш вывод, дату и время, а также сумму снятия, а также показывает остаток средств на вашем счете в квитанции.
Банкомат является сердцем банкомата. Это центральная система банкомата, из которой получены необходимые деньги. Из этой части пользователь может собирать деньги. Банкомат должен рассчитывать каждый счет и указывать необходимую сумму. Если в некоторых случаях деньги сложены, они будут перемещены в другой раздел и станут битом отклонения.Все эти действия выполняются высокоточными датчиками. Полная запись каждой транзакции хранится в банкомате с помощью устройства RTC.
банкоматСеть банкоматов:
Интернет-провайдер также играет важную роль в банкоматах. Это обеспечивает связь между ATM и хост-процессорами. Когда транзакция сделана, данные вводятся владельцем карты. Эта информация передается на хост-процессор банкоматом.Хост-процессор проверяет эти данные в уполномоченном банке. Если данные совпадают, хост-процессор отправляет код подтверждения на аппарат, чтобы можно было перевести деньги.
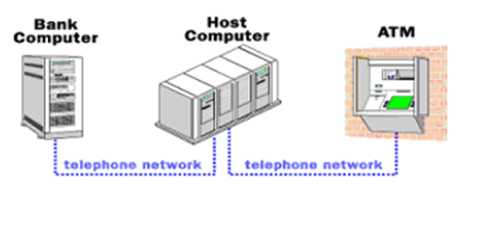 Автоматизированная сеть банкоматов
Автоматизированная сеть банкоматов 2 типа банкоматов
Большинство процессоров хоста могут поддерживать как выделенные, так и коммутируемые аппараты. :
Машины выделенной линии подключаются напрямую к главному процессору через четырехпроводную выделенную телефонную линию.Эти типы машин являются предпочтительными на месте. Эксплуатационные расходы этих машин очень высоки.
Банкоматы с коммутируемым доступом:
Банкоматы с коммутируемым доступом подключаются к главному процессору через обычную телефонную линию с помощью модема. Они требуют нормального подключения, и их первоначальная стоимость установки очень меньше. Эксплуатационные расходы на эти машины низкие по сравнению с машинами на арендованных линиях.
Банкомат Безопасность:
Банкомат защищен ПИН-кодом, который держится в секрете.Невозможно получить PIN-код с вашей карты. Он зашифрован сильным программным обеспечением, таким как Triple Data Encryption Slandered.
Принцип работы банкоматаПринцип действия:
Принципиальная схема банкомата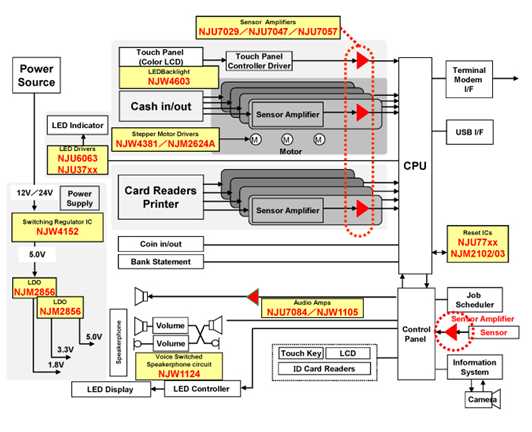
Банкомат - это просто терминал данных с двумя входами и четырьмя устройствами вывода. Эти устройства связаны с процессором. Процессор - это сердце банкомата. Все банкоматы, работающие по всему миру, основаны на централизованной системе баз данных.Банкомат должен соединиться и связаться с хост-процессором (сервером). Хост-процессор связывается с поставщиком услуг Интернета (ISP). Это шлюз через все сети банкоматов, доступные владельцу карты.
Архитектура банкомата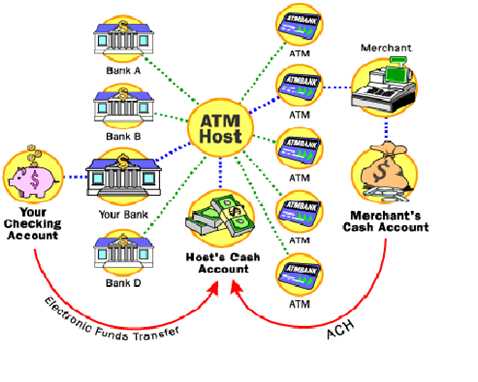
Когда владелец карты хочет совершить транзакцию через банкомат, пользователь предоставляет необходимую информацию через устройство считывания карт и клавиатуру. Банкомат направляет эту информацию на хост-процессор. Главный процессор вводит запрос транзакции в банк держателя карты.Если владелец карты запрашивает наличные, процессор хоста берет деньги со счета держателя карты. Как только средства переводятся со счета клиента на банковский счет хост-процессора, процессор отправляет код подтверждения в банкомат и авторизованный автомат для выдачи наличных. Это способ получить сумму в банкоматах. Сеть банкоматов полностью основана на среде централизованной базы данных. Это облегчит жизнь и обезопасит деньги.
Преимущества банкомата:
- Банкомат обеспечивает круглосуточное обслуживание
- Банкомат обеспечивает конфиденциальность в банковских коммуникациях
- Банкоматы сокращают рабочую нагрузку сотрудников банков
- Банкомат может выдавать клиенту новые банкноты
- Банкоматы удобно для клиентов банков
- Банкомат очень удобен для путешественников
- Банкомат предоставляет услуги без ошибок
Особенности банкомата:
- Перевод средств между связанными банковскими счетами
- Получение баланса счета
- Печать последних транзакций list
- Измените свой пин-код
- Внесите наличные
- Предоплата с мобильного телефона
- Оплата счетов
- Снятие наличных
- Выполните ряд функций на своем иностранном языке.
Теперь у вас есть представление о том, как работает банкомат, поэтому, если какие-либо вопросы по этой теме или по электрическим и электронным проектам оставят комментарии ниже.
Photo Credit
- Банкомат от Renome
- Блок-схема банкомата от st
- Считыватель карт для банкомата от kicteam
- ЖК-дисплей банкомата от zesty
- Банкомат от 4.bp .blogspot
- Работа банкомата через медиа.Developeriq