





Принцип работы балансировочного станка
Описывается устройство, принцип действия и конструкции основных узлов станков для динамической балансировки; рассматриваются типовые узлы по принципу выполняемых функций; даются правила оценки норм точности балансировочных станков единые для заводов-изготовителей и потребителей станков.
В общем случае балансировочный станок содержит (рис. 4.1): балансировочное, приводное, измерительное и корректирующее устройства, а также дополнительные устройства, которые крепят на станине станка.
Балансировочное устройство является колебательной системой станка, в которой устанавливается и вращается неуравновешенный ротор. По колебаниям этой системы при балансировке судят о дисбалансах ротора. В современных станках применяют два типа таких устройств: зарезонансное и дорезонансное.
Зарезонансное балансировочное устройство (рис. 4.2, а) состоит из двух подвижных опор или платформы и упругих элементов, подвешивающих опоры на станине станка. Жесткость упругих элементов различна в разных направлениях. В станках с горизонтальной осью вращения упругие элементы сравнительно жестки в вертикальном направлении, тогда как в горизонтальном направлении жесткость очень мала и подвеска не препятствует колебаниям.
При проектировании и изготовлении зарезонансных станков подбирают массу опор, длину, жесткость подвески и другие параметры балансировочного устройства так, чтобы его собственная частота в горизонтальном направлении во много раз была ниже частоты вращения ротора при балансировке.
При вращении неуравновешенного ротора в зарезонансном балансировочном устройстве подвижные опоры будут колебаться в горизонтальной плоскости. Амплитуды этих колебаний пропорциональны дисбалансам в плоскостях коррекции ротора, т.е. описываются уравнениями (2).
Дорезонансное балансировочное устройство состоит из двух неподвижных опор, жестко закрепленных на станине станка. Собственные частоты колебаний опор во всех направлениях значительно превышают частоты вращения балансируемых роторов. Нижняя часть опоры представляет собой динамометр или силовой мостик. Динамические нагрузки, возникающие в опорах при вращении неуравновешенного ротора, создают малые перемещения на динамометре (рис. 4.2, б), которые усиливаются рычажной системой. Сила в опоре пропорциональна перемещению, т.е.
где к — коэффициент жесткости опоры в горизонтальном направлении.
В дорезонансном балансировочном устройстве по схеме силового мостика (рис. 4.2, в) в одном из плеч силового мостика устанавливают датчик, измеряющий непосредственно динамическую нагрузку от неуравновешенного ротора, описываемую уравнениями (1).
Балансировочные устройства разгонно-балансировочных стендов и станков для высокочастотной балансировки гибких роторов имеют одинаковую жесткость во всех направлениях — являются изотропными и имеют три или четыре опоры.
Принцип действия балансировочных устройств станков с вертикальной осью вращения аналогичен рассмотренным выше. Эти устройства часто конструктивно объединяют с приводным устройством. Балансируемую деталь закрепляют в шпиндельном узле. Шпиндель, подвеска, а иногда и приводное устройство составляют балансировочное устройство станка с вертикальной осью вращения.
Приводное устройство обеспечивает запуск, поддержание постоянной угловой скорости вращения и торможение балансируемого ротора. Основными элементами устройства (рис. 4.3) являются: электродвигатель, коробка передач, тормоз, приводное соединение, схема управления приводным устройством.
В балансировочных станках применяют электродвигатели переменного или постоянного тока различной мощности, ступенчатые и бесступенчатые передачи. Ременные передачи применяют при относительно небольших передаваемых усилиях. В этих передачах используют плоские, клинковые и круглые ремни. Зубчатые передачи обеспечивают передачу больших мощностей и ступенчатое регулирование скоростей вращения. В коробках передач станков используют цилиндрические зубчатые колеса с разным числом зубьев, вводимые последовательно в зацепление друг с другом. Изменение передаточного отношения в приводе иногда производят сменой зубчатых колес.
Приводное соединение связывает выходной вал коробки передач с балансируемым ротором. Различают осевое, ленточное и тангенциальное соединения. Осевое соединение осуществляют с помощью карданных валов (рис. 4.4) различной конструкции. В ленточном соединении применяют плоские бесконечные ремни, охватывающие балансируемую деталь (рис. 4.5). Тангенциальное (касательное) соединение создают прижимные ролики (рис. 4.6, а) и круглые ремни (рис. 4.6, б).
Приводные соединения способны передавать ограниченные крутящие моменты. Поэтому во избежание разрушения приводного устройства во время запуска и торможения ротора используют специальную электрическую схему
управления приводным устройством, обеспечивающую плавность пуска и останова ротора.
Тиристорные системы используют для управления трехфазными асинхронными электродвигателями с короткозамкнутым ротором и электродвигателями постоянного тока. Применение этих систем в балансировочных станках позволяет: управлять электродвигателем бесконтактным способом, ограничивать ударные моменты при пуске, получать широкую гамму пуско-тормозных и регулировочных режимов работы электродвигателя.
Измерительное устройство определяет значения и углы дисбалансов ротора в заданных плоскостях. Его структурная схема (рис. 4.8) состоит из датчиков, цепи разделения плоскостей коррекции или измерения, частотно-избирательных средств, индикаторов значения и угла дисбалансов.
Датчики преобразуют параметры колебаний балансировочного устройства в электрические сигналы. В балансировочных станках применяют контактные (индукционные, пьезоэлектрические) и бесконтактные (токовихревые) датчики.
Индукционный датчик представляет собой катушку индуктивности (рис. 4.9, а), которая может свободно перемещаться в магнитном поле, образованном постоянным магнитом. Катушка жестко соединяется с балансировочным устройством. При колебаниях этого устройства катушка будет также колебаться и в ней возникнет ЭДС индукции, величина которой определяется скоростью изменения магнитного потока, т.е. пропорциональна скорости колебаний балансировочного устройства. При постоянной частоте вращения ротора ЭДС пропорциональна амплитуде перемещения опор станка.
Пьезоэлектрический датчик основан на пьезоэлектрическом эффекте. При механической деформации в определенном направлении, например, кристаллов сегнетовой соли, поляризованной керамики и титаната бария в них возникает электрическое поле (рис. 4.9, б), изменяющее знаки зарядов при изменении направления деформации. Величина заряда, возникающего при пьезоэлектрическом эффекте, пропорциональна действующей силе.
Индукционные и пьезоэлектрические датчики связаны с колебательной системой станка, т.е. являются контактными датчиками.
Токовихревые датчики — бесконтактные, поэтому служат для измерения прогибов вращающихся валов. Принцип действия токовихревого датчика основан на индукционных токах (токи Фуко), возникающих в массивном проводнике, которым является ротор, помещенном в изменяющееся магнитное поле. Изменяющееся магнитное поле создается генератором высокой частоты (рис. 4.10) и колебательным контуром, состоящим из индуктивности Lи емкости С. Изменения зазора между поверхностью датчика и вала при его вращении вызывают изменение выходного напряжения.
Для отметки угла дисбаланса, частоты вращения ротора при балансировке применяют генераторы опорного сигнала, стробоскопы с газосветными лампами, фотоэлектрические и некоторые другие датчики.
Ротор генератора опорного сигнала представляет собой двухполюсный постоянный магнит, вращающийся со скоростью балансируемого ротора, и связан с ним жестко. Статор имеет две взаимно перпендикулярные обмотки и может поворачиваться в любое фиксированное положение вместе с
лимбом, нанесенным на корпусе статора. Выходное напряжение Генератора постоянной величины с известной фазой по отношению к отметке угла на роторе имеет частоту вращения ротора.
При освещении вращающегося ротора неоновой, импульсной или другой газосветной лампой возникает стробоскопический эффект. Этот эффект получается из-за того, что глаз человека импульсы света с частотой более 10 Гц не различает как отдельные вспышки, а воспринимает их как непрерывный поток света. Если импульсы следуют с частотой вращения, то ротор для человеческого глаза будет казаться неподвижным. На таком принципе основан стробоскоп, освещающий при балансировке шкалу (метку), нанесенную на ротор. Освещаемая цифра указывает угол дисбаланса относительно известного положения.
Фотоэлектрический датчик срабатывает от контрастной метки, нанесенной на роторе, и выдает короткие импульсы с частотой вращения ротора.
Электрическую цепь между виброизмерительными преобразователями и частотно-избирательными средствами называют цепью разделения плоскостей коррекции (ЦРПК). ЦРПК автоматически решает уравнения (1)-(5) относительно дисбалансов ротора.
Датчики зарезонансного балансировочного станка включены в ЦРПК последовательно (рис. 4.11, а) с такой полярностью, что их ЭДС действуют навстречу друг другу. В цепи
компенсирующего датчика включен потенциометр настройки R1 или R2. Напряжение на выходе схемы Евых складывается из полного напряжения основного датчика и части напряжения компенсирующего датчика. Цепь разделения плоскостей коррекции дополняется переключателями, реверсирующими фазу напряжения датчиков, и переключателями, коммутирующими потенциометры настройки к тому или другому датчику. Так как положения ползунков потенциометров и переключателей различны для разделения 1-й и 2-й плоскостей коррекции, то органы настройки в схеме дублируются.
В измерительных устройствах балансировочных станков применяют и другие цепи разделения плоскостей коррекции. При многоплоскостной балансировке для решения уравнений (1) в измерительное устройство вместо цепи разделения плоскостей коррекции включают аналоговые или цифровые вычислительные машины, снабженные программами расчетов. Колебания, регистрируемые вибропреобразователями, вызываются как неуравновешенностью ротора, так и погрешностями динамической балансировки. Составную часть колебаний от погрешностей называют колебаниями помех в противоположность полезным колебаниям от дисбалансов.
Корректирующие устройства входят в состав балансировочных станков, предназначенных для крупносерийного и массового производства. Они корректируют массу ротора после его остановки или во время вращения. При работе в автоматическом режиме корректирующие устройства управляются от измерительного устройства.
В балансировочных станках применяют различные дополнительные устройства, обеспечивающие его функционирование. Это пневмо- и гидросистемы, загрузочные и накопительные устройства и т.п.
Избранные главы из книги Левита М.Е., Рыженкова В.М. "Балансировка деталей и узлов". Москва, изд. "Машиностроение", 1986г.
Вас может заинтересовать наша продукция
Балансировочные станки серии БС-44H (в дорезонансном исполнении)
Горизонтальные балансировочные станки серии БС-44H в дорезонансном исполнении для динамической балансировки роторов массой от 3 кг до 10000 кг
Балансировочные станки серии БС-44S (в зарезонансном исполнении)
Горизонтальные балансировочные станки серии БС-44S в зарезонансном исполнении для динамической балансировки роторов массой от 3 кг до 10000 кг
Балансировочные станки серии БС-34
Балансировочные станки для роторов. Серия 34. Точность - до 0,1 гхмм/кг, универсальность. Балансировка роторов от 3 кг до 150 кг.
Балансировочные станки серии БС-24
Балансировочные станки для роторов. Серия 24. Точность - до 0,05 гхмм/кг, универсальность. Балансировка роторов массой от 50 грамм до 10 килограмм.
Станок балансировочный БС-24-5T для роторов турбокомпрессоров
Балансировочный станок для двухплоскостной балансировки роторов турбокомпрессоров массой от 50 г до 5 кг
Балансировочные станки для карданных валов серии БСК-44-100
Станок предназначен для динамической балансировки карданных валов различных типов массой от от 5 кг до 150 кг
Вертикальные балансировочные станки серии БС-В
Высокоточные вертикальные балансировочные станки серии БС-В дорезонансного типа для балансировки рабочих колес насосов, вентиляторов и других похожих тел вращения.
Стойка измерения управления «DAS - 382» и «DAS - 383»
Балансировочные станки для балансировки роторов средней и большой массы оснащаются напольными стойками измерения и управления серии «DAS-38x». Серия включает в себя модели «DAS - 382» и «DAS - 383».
Блок измерения управления «Грас 3.2» и «Грас 3.3»
Балансировочные станки производства компании «Робалс» оснащаются новейшей измерительной системой на базе блоков измерения и управления «Грас 3.2» и «Грас 3.3».
Контрольные роторы
Специальные контрольные роторы, спроектированные по требованиям ГОСТ, для проверки точностных параметров балансировочных станков.
Цель балансировки ротора состоит в том, чтобы уменьшить дисбаланс настолько, чтобы он мог правильно работать после установки на месте. Уменьшение дисбаланса уменьшает вибрацию и увеличивает эффективность и срок службы ротора и подшипников. Кроме того, во время производства и ремонта необходимо сбалансировать роторы до полной сборки, поскольку доступ к ротору может быть ограничен.
Балансировочный станок используется для определения местоположения и количества неуравновешенных масс на роторе.Ротор установлен на подшипниках машины, и машина вращает ротор. Мягкие подшипниковые машины измеряют смещение концов ротора и подшипников. Машина измеряет это смещение и фазовый угол, а затем вычисляет дисбаланс. Балансировочные машины IRD® затем предоставляют оператору поправки к ротору путем сложения или вычитания веса.
Ищете что-то конкретное? Прыгнуть прямо в раздел:
Зачем нужен балансировочный станок?
При оценке ротора дисбаланс не может быть визуально идентифицирован.Отверстие или дополнительный вес на роторе могут быть связаны с первоначальной балансировкой ротора, а не причиной дисбаланса. Единственный способ оценить дисбаланс - это вибрация или сила, которую он генерирует.
При техническом обслуживании и капитальном ремонте вращающегося оборудования во многих случаях нецелесообразно пытаться выполнить балансировку на месте, поскольку поправки на вес невозможно. Это верно для многих насосов и полностью закрытых двигателей, а также для турбин и некоторых центрифуг. Кроме того, процесс ремонта ротора вызывает значительный дисбаланс, который требует балансировки перед сборкой, тем самым устраняя возможные повреждения при запуске машины.Балансировочный станок используется для балансировки деталей перед повторной установкой, обеспечивая бесперебойную работу машины. Балансировочный станок может быть чрезвычайно ценным активом для любого отдела технического обслуживания, который ремонтирует насосы, двигатели и другое вращающееся оборудование. Это может сэкономить затраты из-за задержек, устраняя необходимость отправлять детали сторонним специалистам для балансировки. Часто экономия на одной работе может оправдать расходы на балансировочный станок.
Производители вращающегося механического оборудования должны иметь уверенность в том, что их продукт будет работать бесперебойно при установке на конечном участке.Одной из главных проблем является качество балансировки вращающихся компонентов. Опыт показывает, что производитель может установить допустимый предел дисбаланса, который может быть принят в конкретной машине. Производитель знает, что при превышении этого предела жалобы клиентов и простои оборудования отразятся на качестве его продукции. Чтобы удовлетворить эту ситуацию, детали будут уравновешиваться во время изготовления, в большинстве случаев, до сборки, а иногда уравновешиваться как сборка.
Начало страницы
Типы балансировочных станков
Балансировочные станкиобычно классифицируются в соответствии с используемым принципом, указанием дисбаланса, типа машины, метода работы и т. Д.
Классификация центробежных балансировочных машин
Центробежные балансировочные станки могут быть классифицированы по типу дисбаланса, который машина может указывать (статический или динамический), положению оси цапфы заготовки (вертикальной или горизонтальной) и типу используемой системы поддержки подшипника ротора. (мягкий или жесткий).В каждой категории один или несколько классов машин выпускаются на коммерческой основе.
, класс I - машины для индикации смещения
Машины этого класса обычно относятся к типу мягких подшипников. Они обычно не указывают дисбаланс непосредственно в единицах веса (таких как унции или граммы в фактических плоскостях коррекции), но указывают смещение и / или скорость вибрации в подшипниках. Контрольно-измерительные приборы не указывают непосредственно вес, который должен быть добавлен или удален в каждой из плоскостей коррекции.Балансировка с этим типом машин предполагает использование портативных приборов. Количество и угловое расположение весов коррекции определяются путем выполнения простых векторных вычислений или использования калькулятора для выполнения операций балансировки в двух плоскостях.
, класс II - калибруемые балансировочные станки, требующие сбалансированного прототипа
Машины этого класса относятся к типу мягких подшипников, в которых используются контрольно-измерительные приборы, позволяющие разделить плоскость и выполнить калибровку для данного типа ротора, если имеется сбалансированный главный или прототипный ротор.
, класс III - калибруемые балансировочные станки, для которых не требуется сбалансированный прототип
Машины этого класса относятся к типу мягких подшипников. Любой (несбалансированный) ротор может использоваться в плоскости сбалансированного главного ротора. В свою очередь, разделение плоскости и калибровка могут быть выполнены для роторов без проб и ошибок. К этому классу относятся машины с мягким подшипником и электрическими шейкерами, установленными на вибрирующей части их опор ротора. Микропроцессорная техника позволяет калибровать этот тип без вращения ротора и представляет собой новейшую технологию балансировки.
Класс IV - Балансировочные машины с постоянной калибровкой
Машины этого класса относятся к категории жестких подшипников. Они калибруются изготовителем для всех роторов, попадающих в диапазон веса и скорости данного размера машины. Эти машины показывают дисбаланс при первом запуске без индивидуальной калибровки ротора. Это достигается путем включения аналогового компьютера в контрольно-измерительные приборы, связанные с машиной. Этот тип балансировки требует очень прочного основания машины для устранения вибрационных помех от другого оборудования.
Статическая, невращающаяся балансировка
Первая основная группа основана на том факте, что тело, свободно вращающееся, будет искать положение, в котором его центр тяжести находится наименьшим. Таким образом, более тяжелая сторона ротора будет искать самое низкое положение, автоматически указывая угловое положение несбалансированного груза. Величина дисбаланса определяется экспериментально путем добавления веса в виде воска или замазки к светлой стороне диска до тех пор, пока он не уравновесится, или когда диск больше не вращается.Роликовая опора, маятник и горизонтальные пути могут использоваться для определения статического дисбаланса через гравитацию.
Роликовая стойка на рисунке A является оптимальной, поскольку она позволяет проводить измерения биения и не требует точного выравнивания, как горизонтальные пути на рисунке C. На рисунке B диск поддерживается на гибком кабеле или поочередно шаровое устройство, которое совпадает с центром диска и немного выше нормальной плоскости через центр тяжести.Тяжелая сторона будет стремиться искать более низкий уровень, чем свет, что указывает на угловое положение дисбаланса. Диск уравновешивается путем прибавления веса к точке, диаметрально противоположной точке, до тех пор, пока диск не выровняется, как показано круговым «пузырем» или уровнем в центре балансировочного станка. Вариации этих методов используются.
Статическая (невращающаяся) балансировка удовлетворительная для:
- Роторы с низким отношением длины к диаметру, работающие на низких скоростях
- Узкие роторы, работающие на умеренных скоростях
- Высокоскоростные роторы, которые должны быть собраны на валу, а затем сбалансированы в сборе
Начало страницы
Динамические балансировочные машины
, с мягким подшипникомHard-Bearing
Двухплоскостные балансировочные станки, или динамические балансировочные станки, используются для коррекции статического и динамического дисбаланса. Двумя основными типами динамических балансировочных машин, которые получили наибольшее признание, являются «мягкие» или гибкие подшипниковые машины и «жесткие» или жесткие подшипниковые машины. Хотя между использованными подшипниками нет никакой разницы, машины имеют разные типы подвесок.
Балансировочные станки с мягким подшипником
Машина с мягким подшипником получила свое название благодаря тому, что поддерживает балансировку ротора на подшипниках, которые могут свободно перемещаться по крайней мере в одном направлении, обычно горизонтально или перпендикулярно оси ротора.Теория, лежащая в основе этого стиля балансировки, заключается в том, что ротор ведет себя так, как будто он подвешен в воздухе, пока измеряются движения ротора. Механическая конструкция машины с мягким подшипником немного сложнее, но используемая электроника относительно проста по сравнению с машинами с жестким подшипником. Конструкция балансировочного станка с мягкими подшипниками позволяет размещать его практически где угодно, поскольку гибкие рабочие опоры обеспечивают естественную изоляцию от близлежащей деятельности. Это также позволяет перемещать машину, не влияя на калибровку устройства, в отличие от машин с жесткой опорой.
Резонанс системы ротора и подшипника возникает на половине или меньше от самой низкой скорости балансировки. Балансировка производится на частоте выше, чем резонансная частота подвески.
Помимо того, что балансировочный станок с мягким подшипником является переносным, он обеспечивает дополнительные преимущества, связанные с более высокой чувствительностью, чем у машин с жестким подшипником, при более низких скоростях балансировки; жесткие машины измеряют силу, которая обычно требует более высокой скорости балансировки.Дополнительным преимуществом является то, что наши машины с мягкими подшипниками измеряют и отображают фактическое движение или смещение ротора во время его вращения, что обеспечивает встроенные средства проверки того, что машина правильно реагирует и ротор сбалансирован правильно.
Основным преимуществом подшипниковых машин является их универсальность. Они могут работать с широким диапазоном веса ротора на одном размере машины. Для изоляции не требуется специального фундамента, и машину можно перемещать без необходимости повторной калибровки у специалиста.
Балансировочные машины с мягкими подшипниками, как и машины с жесткими подшипниками, могут балансировать большинство горизонтально ориентированных роторов. Однако для балансировки несущего винта необходимо использовать крепежную деталь, удерживающую отрицательную нагрузку.
На изображении выше показан станок для балансировки мягких подшипников IRD®. Обратите внимание, что ориентация системы подшипников позволяет маятнику качаться взад и вперед вместе с ротором. Смещение регистрируется датчиком вибрации и впоследствии используется для расчета присутствующего дисбаланса.
Твердосплавные балансировочные станки
Балансировочные машины с жестким подшипником имеют жесткие рабочие опоры и полагаются на сложную электронику для интерпретации вибраций. Для этого требуется массивная жесткая основа, где производитель должен постоянно устанавливать и калибровать его на месте. Теория, лежащая в основе этой балансировочной системы, заключается в том, что ротор полностью ограничен, и силы, которые ротор прикладывает к опорам, измеряются. Фоновая вибрация от соседних машин или деятельность на рабочем месте могут повлиять на результаты балансировки.Обычно твердосплавные станки используются в производственных процессах, где требуется короткое время цикла.
Основным преимуществом жестких подшипниковых машин является то, что они имеют тенденцию обеспечивать быстрое считывание дисбаланса, что полезно при высокоскоростной балансировке производства.
Ограничивающим фактором для жестких подшипников является необходимая скорость балансировки ротора во время испытаний. Поскольку машина измеряет силу дисбаланса вращающегося ротора, ротор должен вращаться с высокой скоростью, чтобы генерировать достаточное усилие, которое можно обнаружить жесткими подвесками.
Кнут
Независимо от того, какой горизонтальный балансировочный станок используется, может потребоваться анализ кнута при балансировке длинных, тонких валков или других гибких роторов. Кнут - это измерение деформации или изгиба гибкого ротора. Если вы подозреваете, что вам может потребоваться измерить кнут, обратитесь в нашу службу технической поддержки, и мы определим, необходим ли индикатор кнута для вашего приложения.
Начало страницы
Методы балансировки
Давным-давно для специалиста по балансировке было важно иметь возможность выполнять все расчеты по балансировке, и человеческая ошибка была потенциальным фактором, способствующим во всех ситуациях балансировки.Теперь все автоматизировано. При использовании балансировочных станков IRD® Balancing просто следуйте инструкциям на экране, шаг за шагом. Это следующие шаги:
1. Выберите настройку ротора.
Наши балансировочные инструменты предназначены для работы с 9 различными конфигурациями ротора. Как только вы выберете конфигурацию ротора, вам будет предложено вращать ротор и снять показания измерения, а затем остановить ротор.
2.Калибровка станка с ротором
Балансировочный инструмент затем проинструктирует пользователя добавить известный вес к первому корректирующему местоположению с левой стороны, ввести показанные требуемые размеры, раскрутить ротор и выполнить измерение, остановить ротор, затем убрать вес левой руки. и поместите его в правую плоскость коррекции и повторите. Остановите ротор и снимите известный вес. Затем прибор использует эти измерения для калибровки.
3.Балансировка Ротора
Балансировочный инструмент теперь отображает как правую и левую поправочные величины, так и угловое положение корректирующих весов для сложения или вычитания (определяемого пользователем) материала.
Вот и все! Достижения в области технологий превратили балансировку в довольно простую задачу, сделав ее применимой и необходимой в каждом механическом цехе!
На видео ниже показана демонстрация балансировочного инструмента Model 295.Обратите внимание, что это то же видео, что и на главной странице.
Начало страницы
Альтернатива машинной балансировке - полевая балансировка
Многие роторы часто могут быть сбалансированы на месте, работать на своей собственной рабочей скорости с минимальной разборкой. Конечно, для обеспечения баланса на месте основным требованием является то, что ротор должен быть доступен для внесения исправлений. Такие машины, как вентиляторы и воздуходувки, являются хорошими кандидатами. Полностью закрытой арматуры двигателя и рабочих колес насоса нет.
Техника балансировки на месте называется Балансировка на месте, и она предлагает некоторые явные преимущества, в том числе:
- Балансировка выполняется на полностью собранном станке и компенсирует допуски на сборку.
- Устранена дорогостоящая и трудоемкая разборка для транспортировки ротора к балансировочному станку.
- Эффекты температуры, давления, искажения и других воздействий окружающей среды могут быть включены.
- Результирующая вибрация может представлять собой допуск, приложенный к ротору, а не опубликованные допуски баланса, обычно используемые в балансировочном станке. Это особенно выгодно, если опорная конструкция близка к резонансу. Возможно, придется отрегулировать дисбаланс в роторе до ненормально высокого уровня, чтобы минимизировать результирующую резонансную вибрацию конструкции.
- Поскольку роторы сбалансированы на месте, балансировочный станок приобретать не нужно.
Современные приборы, такие как анализаторы вибрации, сборщики данных и портативные балансировочные устройства, предоставляют точную информацию для помощи в процессе балансировки. Уровень вибрации, измеренный на частоте вращения, используется в качестве показателя величины дисбаланса. Местоположение определяется путем измерения фазы. Фаза (относительное движение одной части машины к другой) измеряется с помощью стробоскопического источника света или индикатора в приборе, запускаемого фотоэлементом.
Крайне важно, чтобы измеренная вибрация была результатом дисбаланса, а не какой-либо другой действующей силы. Только подробный, тщательный анализ может определить, откуда исходит измеренная вибрация. Многие источники вибрации могут возникать при частоте вращения.
При балансировке в полевых условиях к ротору обычно добавляются пробные веса для расчета баланса и постоянные веса для окончательной коррекции. Будьте осторожны при установке веса. Они должны быть надежно закреплены, чтобы они не могли «слететь» во время работы машины.Они не только создают угрозу безопасности персонала, но и могут причинить ущерб. Например, потеря веса в турбине может привести к поломке машины.
Наши полевые балансировочные инструменты - Модель 246 и Модель 258.
Готовы делать покупки? Проверьте наши продукты! (Нажмите здесь)
,
Задумывались ли вы, как индуктивный датчик приближения способен обнаружить присутствие металлической цели? Хотя основополагающая электротехника является сложной, основной принцип работы не так сложен для понимания.
В основе индуктивного датчика приближения («проксимальный» «датчик» или «проксимальный датчик» для краткости) лежит электронный генератор, состоящий из индуктивной катушки, состоящей из многочисленных витков очень тонкой медной проволоки, конденсатора для хранения электрического заряда, и источник энергии для обеспечения электрического возбуждения.Размер индуктивной катушки и конденсатора подобраны так, чтобы производить самоподдерживающиеся колебания синусоидальной волны с фиксированной частотой. Катушка и конденсатор действуют как две электрические пружины, между которыми висит груз, постоянно толкающий электроны назад и вперед между собой. Электрическая энергия подается в цепь, чтобы инициировать и поддерживать колебания. Без поддержания энергии колебание будет разрушаться из-за небольших потерь мощности из-за электрического сопротивления тонкого медного провода в катушке и других паразитных потерь.
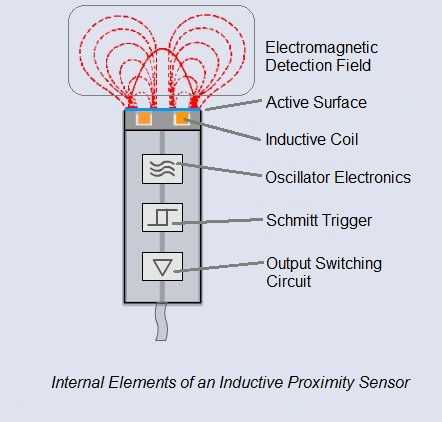
Колебания создают электромагнитное поле перед датчиком, потому что катушка расположена прямо за «лицом» датчика. Техническое название лицевой стороны датчика - «активная поверхность».
Когда кусок проводящего металла входит в зону, определяемую границами электромагнитного поля, часть энергии колебаний передается в металл мишени. Эта передаваемая энергия проявляется в виде крошечных циркулирующих электрических токов, называемых вихревыми токами.Вот почему индуктивные датчики иногда называют вихретоковыми датчиками.
Протекающие вихревые токи сталкиваются с электрическим сопротивлением, пытаясь циркулировать. Это создает небольшую потерю мощности в виде тепла (как маленький электрический нагреватель). Потеря мощности не полностью заменяется внутренним источником энергии датчика, поэтому амплитуда (уровень или интенсивность) колебаний датчика уменьшается. В конце концов, колебание уменьшается до такой степени, что другая внутренняя цепь, называемая триггером Шмитта, обнаруживает, что уровень упал ниже заранее определенного порога. Этот порог - уровень, при котором присутствие металлической мишени определенно подтверждается. После обнаружения цели триггером Шмитта выход датчика включается.
Этот порог - уровень, при котором присутствие металлической мишени определенно подтверждается. После обнаружения цели триггером Шмитта выход датчика включается.
Короткая анимация справа показывает влияние металлической мишени на колебательное магнитное поле датчика. Когда вы видите, что кабель, выходящий из датчика, становится красным, это означает, что металл был обнаружен, и датчик был включен. Когда цель исчезает, вы можете видеть, что колебание возвращается к максимальному уровню, и выходной сигнал датчика отключается.
Хотите узнать больше об основных принципах работы индуктивных датчиков приближения? Вот короткое видео на YouTube, посвященное основам:
Как это:
Нравится Загрузка ...
Генри Менке
У меня есть опыт электротехники, который дает мне прочную техническую базу для моей нынешней роли директора по маркетингу продуктов.
Механические принципы
Модуль 4: Механические принципы Код устройства: F / 601/1450 Уровень QCF: 5 Кредитная ценность: 15 РЕЗУЛЬТАТ 4 ПЕРЕДАЧА ПЕРЕДАЧИ 2 БАЛАНСИРОВКА 4.Динамика вращающихся систем Одиночные и многозвенные механизмы: слайдер
Дополнительная информацияБалансировка с помощью VibroMatrix
Балансировка с помощью VibroMatrix IDS Innomic Gesellschaft für Computer- und Messtechnik mbh Балансировка с помощью VibroMatrix Версия 1.4.0.34, 30.03.2007 Автор Dipl.-Ing. Томас Олчевски IDS Innomic Gesellschaft
Дополнительная информацияNewland Machine Tool Group Inc.
ОБЗОР ИНСТРУМЕНТОВ ДЛЯ ТЯЖЕЛЫХ СТАНКОВ Newland Machine Tool Group Inc. Горизонтально-расточные станки. Серия HBM серии KB с выдвижным шпинделем 130 или 165 мм (ось W), подвижная колонна в направлении шпинделя (ось Z),
Дополнительная информацияОчень гибкие муфты
Конструкция и эксплуатация 8.03.00 Инструкция по монтажу 8.03.00 Виды напряжений 8.04.00 Диаграммы статической деформации стяжного кольца 8.05.00 Размер муфты 8.07.00 Примеры комбинаций
Дополнительная информацияПрактика Экзамен Три Решения
МАССАЧУСЕТТСКИЙ ИНСТИТУТ ТЕХНОЛОГИЙ Физико-физический факультет 8.01T Осенний семестр 2004 г. Практический экзамен Три решения Задача 1a) (5 баллов) Столкновения и центр масс Система координат В лабораторном кадре,
Дополнительная информацияЭксперимент 5 ~ Трение
Цель: эксперимент 5 ~ Трение В этой лабораторной работе вы сделаете несколько основных измерений трения.Сначала вы будете измерять коэффициенты статического трения между несколькими комбинациями поверхностей, используя
Дополнительная информацияИнструмент Bonelle и шлифовальный станок
Инструмент и режущий инструмент Bonelle Измельчитель был построен примерно в 1987 году и экспонировался на 89-й выставке модельного машиностроения, где был награжден бронзовой медалью (см. ME Vol164 № 3868, стр. 273). Впоследствии
Дополнительная информация10.Основы ЧПУ
Принципы и применение CAD / CAM 10 Основы аппаратного обеспечения ЧПУ 10-1 / 10-20 by P.N.Rao 10. Основы аппаратного обеспечения ЧПУ 10.1 Структура станков с ЧПУ Таблица 10.1 Некоторые критерии проектирования для станков с ЧПУ
Дополнительная информацияУстановленные на валу редукторы скорости
Соображения о конструкции моментного рычага для Тодда Р. Бобака работают в зубчатой промышленности в течение 15 летОн занимал должности в области технического обслуживания, проектирования и разработки и обеспечения качества. Он продукт
Дополнительная информацияМеханический анализ рассуждений
Механический анализ причин Работу можно облегчить или ускорить с помощью практического применения простых и / или составных машин. Это называется механическим преимуществом - другими словами, используя основной
Дополнительная информацияЧто такое регенерация?
Что такое регенерация? Руководство по торможению / регенерации Обзор регенерации Редакция 1.0 Когда ротор асинхронного двигателя вращается медленнее, чем скорость, установленная применяемой частотой, двигатель преобразует
Дополнительная информацияБлок управления станком с ЧПУ
Оборудование ЧПУ Оборудование ЧПУ Блок управления станком с ЧПУ Сервопривод Управление гидравлическим сервоприводом Гидравлический блок питания Сервоклапан Сервоусилители Гидравлический двигатель Гидравлический сервоклапан Гидравлический сервопривод
Дополнительная информацияОптимизация станков
Оптимизация станков Решения SKF для сверхточности, производительности и устойчивости. Сила инженерных знаний Работайте быстрее, дольше, станки: независимо от того, разрабатываете ли вы их или используете
Дополнительная информацияЛабораторная работа 7: вращательное движение
Лабораторная работа 7: Оборудование для вращательного движения: DataStudio, датчик вращательного движения, установленный на стержне 80 см, и усиленный настольный зажим (PASCO ME-9472), веревка с петлей на одном конце и небольшим белым шариком на другом конце (125
) Дополнительная информацияИнформация о приложении
Moog Components Group производит полную линейку щеточных и бесщеточных двигателей, а также бесщеточных контроллеров.Целью данного документа является предоставление руководства по выбору и применению
Дополнительная информацияСамоустанавливающиеся шарикоподшипники
Самоустанавливающиеся шарикоподшипники Конструкции ... 470 Базовая конструкция ... 470 Герметичные подшипники ... 470 Подшипники с удлиненным внутренним кольцом ... 472 Подшипники на втулках ... 473 Комплекты самоцентрирующихся шариковых подшипников ... 474 Подходящий
Дополнительная информацияПРЯМЫЕ ТЕКУЩИЕ ГЕНЕРАТОРЫ
ПРЯМЫЕ ТЕКУЩИЕ ГЕНЕРАТОРЫ Редакция 12:50 14 ноября 05 ВВЕДЕНИЕ Генератор - это машина, которая преобразует механическую энергию в электрическую с использованием принципа магнитной индукции.Это принцип
Дополнительная информацияДатчик реактивного момента
Усилие 1 1 Нм до 1 000 1 000 Нм Тип 9329A 9389A Эти простые в установке пьезоэлектрические датчики реактивного крутящего момента особенно подходят для измерения быстро меняющихся моментов вращения на невращающихся валах.
Дополнительная информацияПримечание по применению в полевых условиях
Поле Применение Примечание Выравнивание индикатора обратного набора RDIA Неправильное выравнивание может быть наиболее распространенной причиной недопустимой работы и высокого уровня вибрации.Новое оборудование или установка нового оборудования
Дополнительная информацияОсновы мотора. Двигатель постоянного тока
Основы двигателя Прежде чем мы сможем изучить функцию привода, мы должны понять основные принципы работы двигателя. Он используется для преобразования электрической энергии, подаваемой контроллером, в механическую
Дополнительная информацияИнтерактивные компьютерные курсы
Эти инструменты самообучения SKF (SLT) являются интерактивным решением для студентов разных уровней, включая студентов, изучающих механику и другие инженерные дисциплины.Они устраняют необходимость брать
Дополнительная информацияИнструкция по эксплуатации
Инструкция по эксплуатации Датчик крутящего момента типа AE со сменным тензометрическим измерительным элементом Модель TQ 505 Инструкция по эксплуатации №. Преобразователь крутящего момента 1079 TQ 505 Page 1/16 1. Содержание 1. Список
Дополнительная информацияМеханические принципы
Модуль 4: Механические принципы Код устройства: F / 60/450 Уровень QCF: 5 Кредитная ценность: 5 РЕЗУЛЬТАТ 3 ПРИВОДНЫЕ РЕМНИ ПЕРЕДАЧИ ЭЛЕКТРОПЕРЕДАЧИ 3 Приводы ременного привода: плоский и клиновой ремни; предельный коэффициент
Дополнительная информацияТруборезные и скошенные раскладушки
Раскрой труборезов и раскосные грейферы Кто мы - одна компания, полная поддержка, комплексные решения На протяжении более чем столетия Hydratight предоставляет решения для болтовых соединений мирового класса и продолжает устанавливать международные
Дополнительная информацияРучной поршневой пробоотборник... м 11
ВЫБОРКА Ручной поршневой пробоотборник ... m 11 Винтовой пробоотборник ... prec 22 ... PREC 100 Слайд-пробоотборник ... pr 55 Роторно-винтовой пробоотборник ... prv Поршневой пробоотборник ... p 11 Пробоотборник на ленточном конвейере ... pba Пробоотборник с вращающейся чашкой ... pgr
Дополнительная информацияСИНХРОННЫЕ МАШИНЫ
СИНХРОННЫЕ МАШИНЫ Геометрия синхронной машины очень похожа на геометрию индукционной машины.Сердечник статора и обмотки трехфазной синхронной машины практически идентичны
Дополнительная информация ,


